

실험 목적
회전체의 불평형(imbalance)는 회전 중심선에 대한 회전체 중량의 불균일한 분포에 의해 발생한다. 불평형이 발생하는 원인은 작동환경에 따른 비틀림, 회 전중심이 도심과 일치하지 않는 편심 등 여러 가지가 있으며, 더 나아가 회전 기계의 고장 및 파손을 초래할 수 있다.
본 실험에서는 회전 시스템에서의 불평형 현상을 직접 확인하고, 교정질량(correction mass)를 통한 영향계수법 (Influence Coefficient)을 사용하여 불평형을 최소화 하고자 한다.
실험 이론 및 원리
1. 불평형(Imbalance)
불평형이란 회전체의 회전 중심선에 대한 회전체 중량의 불균일한 분포상태이다. 한편 ISO에서는 “원심력에 의해 진동력 즉, 진동운동이 베어링에 전달될 때 회전체에 존재하는 어떤 상태”라고 정의하고 있다. 이러한 정의는 일반적으로 강성 회전체나 탄성 회전체 모두의 불평형에 적용한다. 그러나 탄성 회전체의 경우 불평형은 속도와 더불어 변하기도 하고, 이들 회전체에 대하여 어떤 주어진 불평형 값은 주어진 속도와 관계가 있다. 불평형이란 말은 때로는 “불평형량”또는 “불평형 벡터”를 나타내는데 사용된다.
 |
| 그림 1. 불평형량의 표시 방법들 |
회전체에서 불평형량은 불평형 Weight량과 회전 중심선으로부터 Weight까지의 거리의 곱으로 표현한다. 따라서 불평형의 단위는 일반적으로 gr-cm, Oz-inch 또는 gr-inch 등으로 나타낸다. 예를 들면 그림 3-1에서와 같이 회전 중심으로부터 반경 20cm위치에 6 gr의 Heavy Spot가 있다는 것은 불평형량이 6gr x 20cm=120 gr-cm임을 뜻한다.
질량, 시간, 체적 또는 힘과 같은 양은 임의의 선정된 방향으로 하나의 선의 길이로 표현할 수 있으며 이를 Scalar량이라 한다. 한편 크기와 방향 모두를 가지는 양을 벡터량이라 한다. 회전체의 불평형은 회전체가 회전축으로부터 밖으로 이동하려고 하는 벡터적인 힘을 초래하는 것이 분명하다. 이 힘과 회전체상의 정확한 위치는 직접 측정할 수 없지만 회전체나 베어링 페데스탈에 미치는 영향은 측정할 수 있다.
불평형력은 회전체상의 기준점에 대한 어떤 방향과 불평형량과 동등한 크기를 가지기 때문에 벡터로 표현할 수 있다. 따라서 불평형 벡터는 불평형량과 기준점으로부터 측정된 방향에 비례하는 직선의 길이로 표현된다. 벡터는 진동과 발란싱 문제를 해결하는데 아주 중요하다. 벡터는 불평형량과 방향을 나타내는데 뿐만 아니라 발란싱 문제를 해결할 때 Trial Weight의 영향을 측정하는데 사용된다.
2. 불평형(Imbalance)의 종류
1) Static Unbalance

2) Coupled Unbalance

3) Dynamic Unbalance

3. Single Plane balancing(단면밸런싱)과 Two Plane balancing(이면밸런싱)
Single Plane balancing(단면밸런싱)에서 Weight Balancing의 조건은 기계가 Balancing Weight에 대하여 진동 진폭 및 위상이 선형적으로 응답한다고 가정한다. 즉 Balance Weight의 크기가 2배 될 때 효과벡터 크기도 2배 된다는 뜻이고, Balance Weight가 회전체 상의 같은 aux에서 각도 세타만큼 움직이면 효과벡터 또한 같은 방향으로 같은 세타 각만큼 움직인다는 뜻이다. 이것은 중요한 가정으로 이 가정이 지켜지지 않을 때에는 진동교정 작업은 불가능하다.
밸런싱을 처음 시도하고자할 때는 Heavy Spot가 얼마나 크고 어느 위치에 있는지 모른다. 기계가 원래부터 불평형 상태에 있을 때는 이를 초기 불평형이라하며 이를 나타내는 진동진폭과 위상값을 초기 진동치라하고 0-Shot 또는 Run-0로 표시한다.
예로써 초기 불평형이 50 마이크로미터, 240도인 기계가 있다고 하자. 우선 초기 진동치를 측정기록하여 둔 다음 그 기계에 Trial Weight를 달아 초기 불평형 상태를 변화시켜 본다. 이때 회전체의 불평형은 새로운 진동진폭 및 위상을 갖게된다. 이 Trial Weight에 의한 진동 벡터의 변화 상태를 이용하면 초기 불평형의 양과 위치를 알 수 있다. 따라서 초기 Heavy Spot의 양(무게)을 Heavy Spot의 반대편에 달면 밸런싱이 완료된다.
다시 말하면 초기 불평형의 Heavy Spot 위치에서 Trial Weight에 의한 효과벡터를 Polar Graph에 도시하고 효과벡터의 길이와 방향을 측정한다. 즉 몇 gr의 Trial Weight를 어느 각도에 달았을 때 초기 진동치로부터 어느 방햐야으로 얼마만큼의 진동이 발생했는가를 나타낸 것을 Rotor Balance Sensitivity라고 한다. 이 Balance Sensitivity를 이용하여 밸런싱을 하는 방법을 영향계수법 또는 효과 벡터법이라고 한다.
Two Plane Balancing(이면밸런싱)이란 단면밸런싱과 같은 방법으로 여러번 시행하면 된다. 그러나 발생한 불평형 문제의 형태에 따라 좋은 결과를 가져오는 통상적으로 사양되는 여러 가지 밸런싱 방법이 있다. 어느 방법을 선택하느냐 하는 문제는 불평형의 형태, 회전체의 길이대 폭의 비, 정격속도에 대한 실제 발란싱 속도, 로터의 탄성 및 상대 효과벡터(Cross Effect)의 양과 같은 여러 인자에 따라 다르다.
차이점으로는 Two Plane Balancing(이면밸런싱)에서는 상대 효과벡터(Cross Effect)에 특별한 주의가 필요하다. 이면밸런싱은 불평형을 교정할 면이 2개 있다는 것이다. 따라서 한쪽 면에 밸런싱을 맞추었을 때, 다른 면에 나타나는 영향을 고려할 필요가 있다.
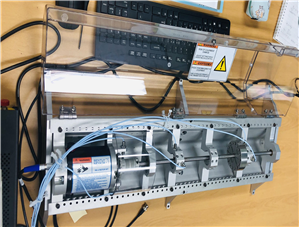
실험 기구 및 장치
| 미국 GE Bently Nevada 社에서 제작한 실험장비로서 실제 회전 기계의 작동 매커니즘을 묘사하였으며, 별도의 Oil Whirl/Whip kit를 사용하여 저널 베어링 작동도 구현할 수 있다. | ||
| 미국keysight 社에서 제작하였으며 특정 시간 간격의 전압 변화를 볼 수 있으며 또한 주기적으로 반복되는 전자 신호를 표시하는데 사용하는 측정장비로서 이번 실험에서는 불평형에 의한 amplitude를 측정하기 위해 사용하였다. |

!&emoji=☕&slug=xFu35q9&button_colour=5F7FFF&font_colour=ffffff&font_family=Poppins&outline_colour=000000&coffee_colour=FFDD00)



![[일반생물학실험]온도와 pH가 효소작용에 미치는 영향 1부](https://blogger.googleusercontent.com/img/b/R29vZ2xl/AVvXsEjdvNA5S925m8lScjFhJj-uy5SdCcaNFG1AuR_7BbQbDEoHBDEEkqfM64sipvro3RydmSO4_MS2794o2bJ0FCljQ31pcD5W39ZGOHROD7qKXLO1rlm2ZuBtbxJ9CZHSnsk2v1KSEsL4EGA/w680/%25EC%2598%25A8%25EB%258F%2584%25EC%2599%2580+pH%25EA%25B0%2580+%25ED%259A%25A8%25EC%2586%258C%25EC%259E%2591%25EC%259A%25A9%25EC%2597%2590+%25EB%25AF%25B8%25EC%25B9%2598%25EB%258A%2594+%25EC%2598%2581%25ED%2596%25A5.PNG)
![[일반생물학실험]여러 조건에 따른 효소 반응](https://blogger.googleusercontent.com/img/b/R29vZ2xl/AVvXsEj4kaETe9N8j9q9-ClYy9V1kM2L9s5l19K6YoBOE0SB70BmssQXzVADvQijp1ieiQ9mIxcmCwz9e-YCQFVnXYR7m1vmfjTSs0ZNxCmBLG7wgzRBqiY1Kizx8YuhSdw-RDbs1PohokUd69c/w680/%25EC%2597%25AC%25EB%259F%25AC+%25EC%25A1%25B0%25EA%25B1%25B4%25EC%2597%2590+%25EB%2594%25B0%25EB%25A5%25B8+%25ED%259A%25A8%25EC%2586%258C+%25EB%25B0%2598%25EC%259D%2591.PNG)
![[일반생물학실험]항생제 감수성 검사 1부](https://blogger.googleusercontent.com/img/b/R29vZ2xl/AVvXsEhwCJEjB_r2Ojsrn244q-fQmpHsDyUUfgWMUnsfhPKQeN2e7_u1pN_ZuwIdxPLVWS6LFywJUrDTYWJe2V6ZVVb1PtfyvX62Y15OxPfXoiaJkqVoSir3ZoFAmDpe5GcoMBmxEsJUKsSvWYc/w680/%25ED%2595%25AD%25EC%2583%259D%25EC%25A0%259C+%25EA%25B0%2590%25EC%2588%2598%25EC%2584%25B1+%25EA%25B2%2580%25EC%2582%25AC.PNG)
![[고분자공학실험]PMMA 중합 반응 - MMA, AIBN 정제와 PMMA Bulk 중합 1부](https://blogger.googleusercontent.com/img/b/R29vZ2xl/AVvXsEj5hkRZhYWcXolP679_yO0kyP8_R-G9dlTqk5AGEdfsIq9M5K3DJc_tvpYck4x1kciBm2IWwFygrzfWH-HPzUjXiCHAFrjv9zeKYDxAl2tGNqgryyc3t9y4B9lQveS_coAqnmZw4pX4Hyo/w680/PMMA+%25EC%25A4%2591%25ED%2595%25A9+%25EB%25B0%2598%25EC%259D%2591.PNG)
![[일반화학실험]산화-환원 적정 : 비타민 C의 정량 1부](https://blogger.googleusercontent.com/img/b/R29vZ2xl/AVvXsEintFUW1pYHbKK8MPzki4vdqVMjTUEFFxPdZB1sTJQw13XSFZWqcN5w0x1AlyzfErlYYSgoNqBni4YGlpFC4ZeULK9VHbhfIXLiuZ3UWTl2oBRua7FE8UUQqtYEx3498FENAnlHlh0f8RFkT7Na8jveOtBtQ5UbY8jE80ZCwFoU_jqw_0Z6BofRYZF7/w680/%EC%82%B0%ED%99%94-%ED%99%98%EC%9B%90%20%EC%A0%81%EC%A0%95%20-%20%EB%B9%84%ED%83%80%EB%AF%BC%20C%EC%9D%98%20%EC%A0%95%EB%9F%89.PNG)
0 댓글